在电脑萝卜圈中组装机器人是一项既充满乐趣又极具挑战性的活动,无论你是初次接触机器人制作,还是已经有一定经验的爱好者,掌握正确的组装方法和技巧都能帮助你更高效地完成作品,下面将详细介绍从准备工作到最终调试的全过程,希望能为你的机器人制作之旅提供实用参考。
开始之前,确保你已准备好所需的硬件和软件工具,硬件方面主要包括主控板、电机、传感器、结构件、螺丝及连接线等,软件方面则需要安装萝卜圈官方提供的编程环境,确保其与你的操作系统兼容,建议在动手前对照清单逐一检查物料,避免因缺少零件而中断组装进程。
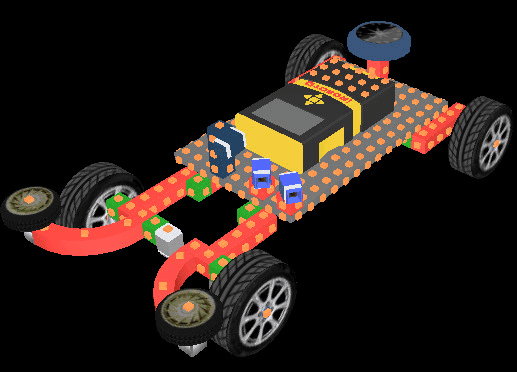
第一步是构建机器人的机械结构,根据设计图纸或自定义方案,将结构件通过螺丝、螺母等连接件固定在一起,注意确保各部位连接牢固,避免在运动过程中出现松动,若使用金属或塑料材质,需注意受力均匀,防止局部应力过大导致断裂,底盘设计应兼顾稳定性和灵活性,合理的重量分布有助于提升机器人的运动性能。
接下来是电路部分的连接,将主控板作为核心,依次连接电机、传感器和其他扩展模块,接线时务必遵循说明书上的指引,注意电压和接口的匹配,避免反接或短路,使用扎带或固定胶妥善整理线路,防止缠绕或拉扯导致接触不良,推荐在通电前用万用表检查关键节点的连通性,提前排除潜在问题。
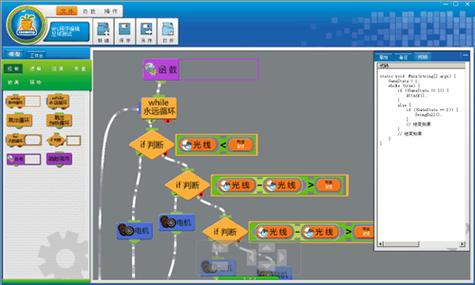
完成硬件组装后,进入软件配置阶段,打开萝卜圈编程软件,创建新项目并选择对应的主控板型号,编写控制程序时,可从基本运动功能开始,逐步添加传感器数据处理、逻辑判断等模块,利用软件提供的仿真功能测试代码逻辑,减少实际运行时的调试时间,初始阶段建议采用模块化编程思路,将复杂任务拆解为多个简单函数,便于后续维护和升级。
调试是机器人组装中不可或缺的环节,首次通电后,先观察主控板指示灯是否正常亮起,然后逐一测试电机转向、传感器反馈等基本功能,若出现异常,优先检查电源供应和接线顺序,运动测试时注意周围环境安全,避免高速旋转部件造成意外,通过反复调整参数优化性能,例如修改电机功率补偿误差,或校准传感器提高数据准确性。

在长期使用过程中,定期维护能延长机器人寿命,清理积尘、检查螺丝紧固情况、更新软件版本都是保持良好运行状态的有效措施,遇到无法解决的问题时,可参考萝卜圈官方文档或社区论坛中的案例分享,许多常见故障已有现成的解决方案。
个人认为,机器人组装不仅考验技术能力,更需要耐心和创造力,每一次尝试都是学习的机会,即使遇到挫折也能积累宝贵经验,随着技术进步,萝卜圈平台将持续提供更多资源支持,帮助爱好者实现更复杂的项目,保持探索热情,你会发现机器人技术的无限可能。

 13888888888
13888888888

 点击咨询
点击咨询 